本ドライバの応用例として、電流ベクトル制御を行った場合の波形を示します。
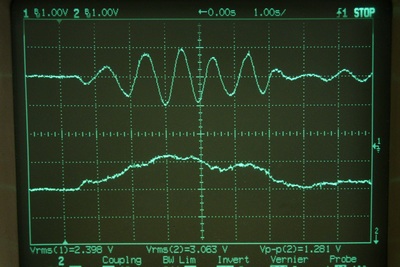
q軸電流を指令値に追従させるよう、電流フィードバックを行い、更にそれを使って回転速度フィードバック制御を実行してみました。下の写真は、回転速度を60 rpm一定に制御中にモータ軸に負荷トルクを加えた場合の波形です。上がU相電流、下が3相-2相変換を行って得たq軸電流です。負荷トルクはモータ軸を手でつまんでいるだけですので、大きく変動しています。
速度を一定に保つべく負荷トルクに相当したq軸電流が流れているのが分かります。
下の波形は、負荷トルクの与え方を変えた場合の波形です。
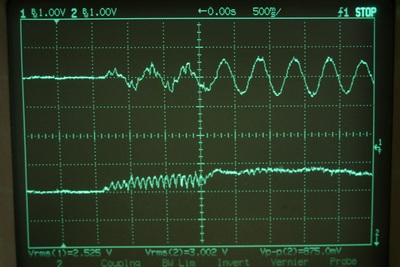
モータ軸には、下の写真のように六角の金属製スペーサを取り付けてあります。上の波形の前半では、スペーサの六角部分を爪の先ではさんでいるので短い周期の負荷変動がありますが、後半はソフトにつかんだので概ね一定の負荷トルクがかかっています。下の波形(q軸電流)を見ると、負荷の状態が変化しているのがはっきりと判ると思います。

このように、本ドライバを使用することで、モータ制御中に負荷の状態をかなり正確に判別する制御系を構成することが出来ます。
尚、写真の波形は、ドライバと、CAN接続D/Aボックス(下の写真の左側)とを接続し、CAN通信を介して内部データをアナログ出力してオシロでモニタしました。